
2.1 Каркас с АРМ летчика
2.1.1 АРМЛ4 предназначен для:
| - |
размещения обучаемого экипажа (летчика);
|
| - |
размещения имитаторов приборного оборудования;
|
| - |
размещения имитаторов системы управления самолетом;
|
| - |
размещения имитаторов системы управления двигателями;
|
| - |
обеспечения работы обучаемого экипажа (летчика) путем формирования ИУП кабины имитируемого самолета;
|
| - |
размещения оборудования СЧ7 АРМ ПЛС на Су-35С (ИБП10 и блока электропитания из состава СЭП11).
|
Формирование ИУП моделируемого самолета осуществляется путем:
| - |
отображения на экранах мониторов (сенсорных мониторов) изображений приборной доски и щитков, воспроизводящих оборудование кабины самолета Су-35С;
|
| - |
воспроизведения внешнего вида и конструкции органов управления самолетом и двигателями (ручки управления самолетом, педалей, рычагов управления двигателями);
|
| - |
воспроизведения для обучаемого экипажа (летчика) на органах управления самолетом и двигателями характерных тактильных ощущений и нагрузок.
|
2.1.2 Состав АРМЛ:
| - |
основание;
|
||||
| - |
оборудование АРМЛ4:
|
||||
|
|||||
| - |
имитатор системы управления;
|
||||
| - |
имитатор кресла;
|
||||
| - |
видеокамера;
|
||||
| - |
гарнитура;
|
||||
| - |
сенсорный монитор Элемент-М15 левый (далее – монитор М15Л);
|
||||
| - |
сенсорный монитор Элемент-М15 правый передний (далее – монитор М15ПП);
|
||||
| - |
сенсорный монитор Элемент-М15 правый задний (далее – монитор М15ПЗ);
|
||||
| - |
сенсорный монитор Элемент-М17 (далее – монитор М17);
|
||||
| - |
сенсорный монитор Элемент-М32 (далее – монитор М32);
|
||||
| - |
кабельная сеть.
|
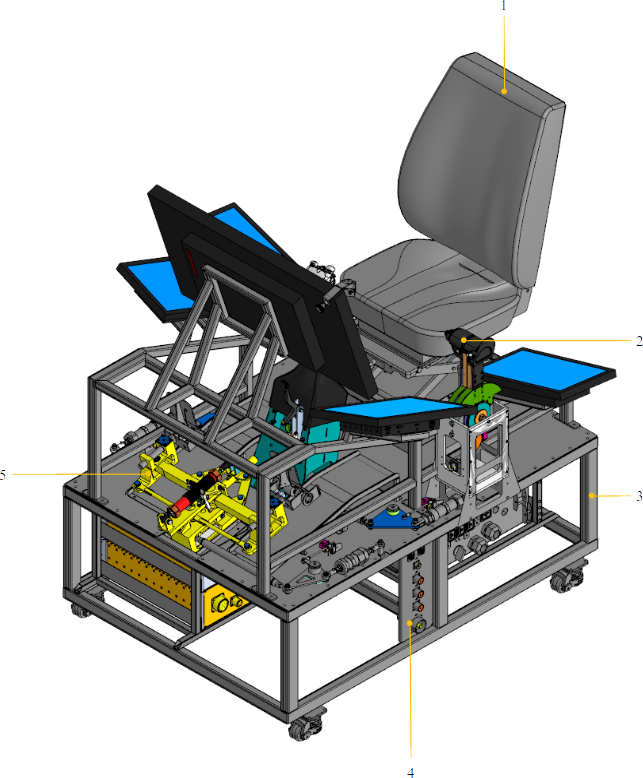
Рисунок 3.1: Общий вид АРМЛ (вид спереди)
| 1. |
Имитатор кресла
|
| 2. |
Имитатор рычагов управления двигателями (РУД) из состава имитатора системы управления
|
| 3. |
Основание
|
| 4. |
Панель ввода-вывода
|
| 5. |
Имитатор педалей из состава имитатора системы управления
|
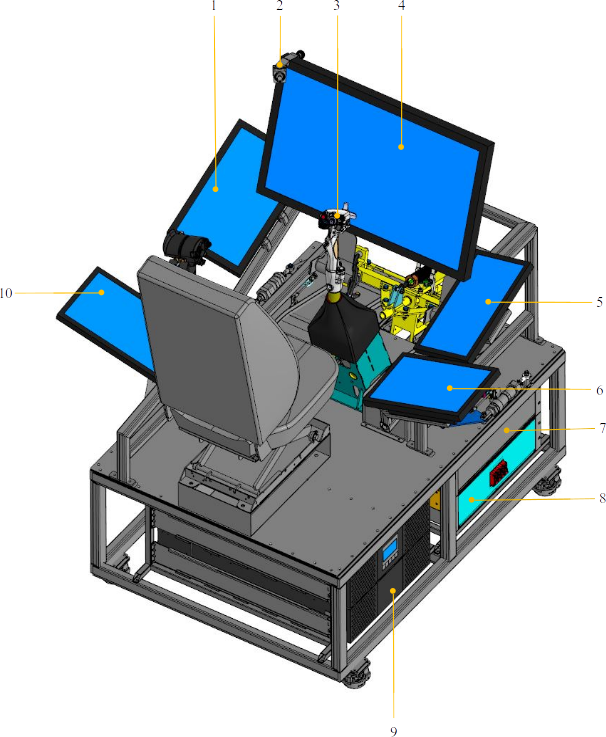
Рисунок 3.2: Общий вид АРМЛ (вид сзади)
| 1. |
Монитор М17
|
| 2. |
Видеокамера
|
| 3. |
Имитатор ручки управления самолетом (РУС) из состава имитатора системы управления
|
| 4. |
Монитор М32
|
| 5. |
Монитор М15ПП
|
| 6. |
Монитор М15ПЗ
|
| 7. |
Блок сопряжения оборудования из состава оборудования АРМЛ
|
| 8. |
Блок электропитания из состава СЭП
|
| 9. |
ИБП из состава СЭП
|
| 10. |
Монитор М15Л
|
2.1.2.1 Основание предназначено для установки и размещения оборудования АРМЛ, имитатора системы управления, имитатора кресла, видеокамеры, монитора М15Л, монитора М15ПП, монитора М15ПЗ, монитора М17, монитора М32, оборудования из состава СЭП, а также для прокладки кабельной сети.
Состав основания:
| - |
платформа;
|
| - |
зашивка;
|
| - |
площадка подпедальная – 2 шт.;
|
| - |
самоустанавливающееся колесо – 4 шт.;
|
| - |
стойка.
|
Общий вид основания приведен на рис. 3.3.
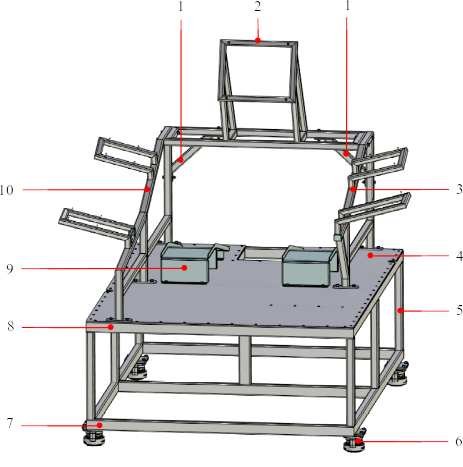
Рисунок 3.3: Общий вид основания
| 1. |
Кронштейн (2 шт.)
|
| 2. |
Кронштейн для установки монитора М32
|
| 3. |
Стойка правая
|
| 4. |
Зашивка
|
| 5. |
Платформа
|
| 6. |
Самоустанавливающееся колесо (4 шт.)
|
| 7. |
Рама нижняя
|
| 8. |
Рама верхняя
|
| 9. |
Площадка подпедальная (2 шт.)
|
| 10. |
Стойка левая
|
Платформа представляет собой сварную конструкцию из стальных труб прямоугольного сечения и включает в себя раму верхнюю и раму нижнюю.
На раме верхней закреплена зашивка из листового материала, служащая полом для АРМЛ4.
На зашивке закреплены две площадки подпедальные.
На раме нижней закреплены четыре самоустанавливающихся колеса для обеспечения перемещения АРМЛ внутри помещения и установки в фиксированном положении.
В конструкции платформы предусмотрены места для установки оборудования АРМЛ (блока сопряжения оборудования и панели ввода-вывода) и оборудования из состава СЭП11 (ИБП10 и блока электропитания).
Стойка представляет собой сборную конструкцию и включает в себя стойку правую, стойку левую, кронштейн для установки монитора М32 и два кронштейна.
Кронштейны предназначены для соединения стойки правой, стойки левой и кронштейна для установки монитора М32 между собой.
На стойке правой размещаются монитор М15ПП и монитор М15ПЗ (рис. 3.2).
На стойке левой размещаются монитор М15Л и монитор М17 (рис. 3.2).
Стойка правая, стойка левая и кронштейны представляют собой сварные конструкции из стальных труб квадратного сечения.
Стыковка СЧ7 основания между собой производится болтовыми и заклепочными соединениями.
Стыковка основания с другими СЧ АРМЛ производится болтовыми соединениями.
Основание окрашено эмалью черного цвета.
2.1.2.2 Блок сопряжения оборудования (БСО) предназначен для обеспечения взаимодействия и обмена данными между оборудованием АРМЛ и ВК в реальном масштабе времени по ЛВС.
В БСО установлены преобразователь, плата TEN60, плата TEN60-12 и плата А13D.
Общий вид БСО приведен на рис. 3.4.
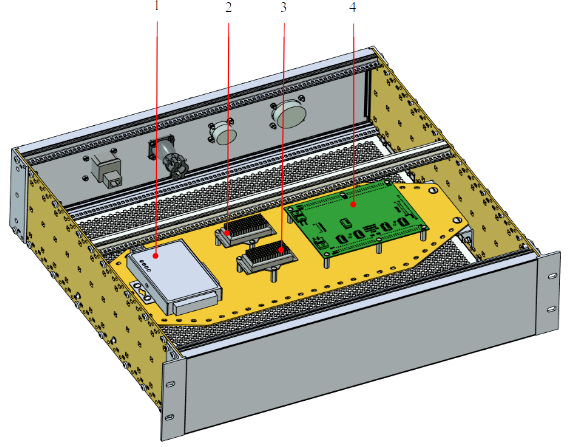
Рисунок 3.4: Общий вид БСО
| 1. |
Преобразователь
|
| 2. |
Плата TEN60
|
| 3. |
Плата TEN60-12
|
| 4. |
Плата А13D
|
БСО размещен в основании АРМЛ4, с правой стороны (рис. 3.2).
Связь БСО с ВК5 осуществляется через преобразователь, преобразующий последовательные интерфейсы RS-422 (RS-485) в интерфейс Ethernet.
Внешний вид преобразователя приведен на рис. 3.5.
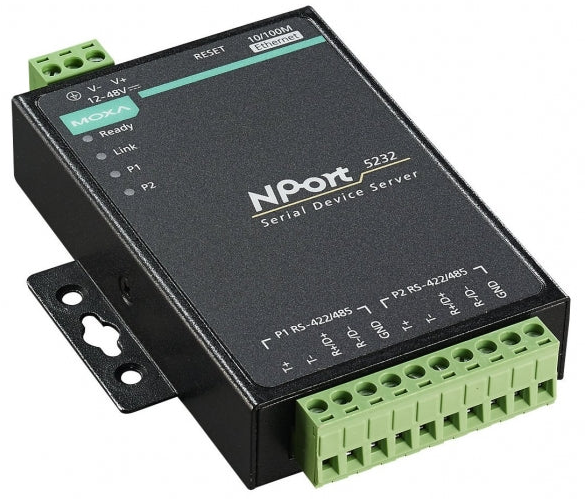
Рисунок 3.5: Внешний вид преобразователя
|
Наименование характеристики
|
Значение
|
|
Последовательные порты
|
|
|
Количество портов
|
2
|
|
Тип портов
|
RS-422/485
|
|
Разъемы
|
Клеммы
|
|
Передаваемые сигналы
|
RS-422: Tx+, Tx-, Rx+, Rx-, GNDRS-485 (2-проводный): Data+, Data-,GNDRS-485 (4-проводный): Rx+, Rx-, Tx+, Tx‑, GND
|
|
Защита от импульсных помех, кВ
|
15
|
|
Управление направлением передачи данных по RS-485
|
ADDC
|
|
Интерфейс Ethernet
|
|
|
Количество портов
|
1
|
|
Тип портов
|
10/100 Base-T
|
|
Разъемы
|
RJ45
|
|
Сетевые протоколы
|
ICMP, IP, TCP, UDP, DHCP, BooTP, Telnet, DNS, SNMP, HTTP, SMTP, SNTP, ARP, Rtelnet
|
|
Гальваническая изоляция, кВ
|
1,5
|
|
Управление потоками данных
|
XON/XOFF
|
|
Скорость передачи данных, бит/сек
|
От 110 до 23040
|
Таблица 3.1: Основные технические характеристики преобразователя
Плата TEN-60 предназначена для преобразования напряжения питания 24 В в напряжение питания 5 В.
Плата TEN-60-12 предназначена для преобразования напряжения питания 24 В в напряжение питания 12 В.
Внешний вид платы TEN-60, платы TEN-60-12 приведен на рис. 3.6.

Рисунок 3.6: Внешний вид платы TEN-60, платы TEN-60-12
Основные технические характеристики платы TEN-60, платы TEN-60-12 приведены в таб. 3.2.
|
Наименование характеристики
|
Значение
|
|
|
Плата TEN-60
|
Плата TEN-60-12
|
|
|
Тип преобразователя
|
DC/DC
|
DC/DC
|
|
Входное напряжение, В
|
24
|
24
|
|
Выходное напряжение, В
|
5
|
12
|
|
Нестабильность по нагрузке, %
|
0,5
|
0,5
|
|
Нестабильность по сети, %
|
0,2
|
0,2
|
|
Диапазон входного напряжения, В
|
От 18 до 36
|
От 18 до 36
|
|
Выходной ток, А
|
12
|
5
|
|
Количество выходов
|
1
|
1
|
Таблица 3.2: Основные технические характеристики платы TEN-60, платы TEN-60-12
Плата А13D предназначена для сбора и обработки аналоговых и дискретных сигналов.
Внешний вид платы А13D приведен на рис. 3.7.
Рисунок 3.7: Внешний вид платы А13D
Основные технические характеристики платы А13D приведены в таб. 3.3.
|
Наименование характеристики
|
Значение
|
|
Напряжение питания, В
|
От 5 до 9
|
|
Количество каналов аналого-цифровых преобразователей (АЦП) с поканальной защитой для оцифровки и цифровой обработки потенциометрических датчиков и/или измерения значения напряжения
|
8
|
|
Разрядность АЦП12, бит
|
10
|
|
Количество входных каналов для оцифровки и цифровой обработки дискретных сигналов
|
60
|
|
Наименование характеристики
|
Значение
|
|
Количество каналов цифро-аналоговых преобразователей (ЦАП) с широтно-импульсным модулятором
|
64
|
|
Каналов управления индуктивными двухобмоточными логометрами с точностью 0,35 град
|
4 или 8
|
|
Разрядность ЦАП13, бит
|
8
|
|
Канал связи
|
RS-422 или RS-485
|
Таблица 3.3: Основные технические характеристики платы А13D
2.1.2.3 Панель ввода-вывода предназначена для подключения информационных кабелей и кабеля электропитания к АРМЛ4.
Общий вид панели ввода-вывода приведен на рис. 3.8.
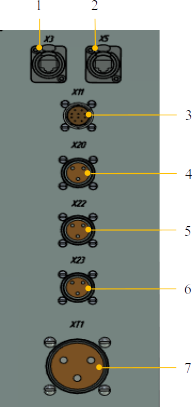
Рисунок 3.8: Общий вид панели ввода-вывода
| 1. |
Разъем для подключения информационного кабеля БСО
|
| 2. |
Разъем для подключения информационного кабеля видеокамеры
|
| 3. |
Разъем для подключения аудиокабеля гарнитуры
|
| 4. |
Разъем для подключения кабеля электропитания СИВО
|
| 5. |
Разъем для подключения кабеля электропитания ВК
|
| 6. |
Разъем для подключения кабеля электропитания ВК
|
| 7. |
Разъем для подключения к АРМЛ4 кабеля электропитания от щитка электропитания автоматизированного рабочего места (АРМ) из состава КС ПЛС
|
Панель ввода-вывода размещена в основании АРМЛ с левой стороны (рис. 3.1).
2.1.2.4 Имитатор системы управления предназначен для:
| - |
воспроизведения внешнего вида и конструкции органов управления самолетом Су-35С (РУС14, педалей и РУД15);
|
| - |
воспроизведения на имитаторах органов управления загрузки, ощущаемой летчиком в «полете»;
|
| - |
выдачи в ВК5 данных с датчиков положения имитаторов органов управления.
|
Состав имитатора системы управления:
| - |
имитатор РУС;
|
| - |
имитатор педалей;
|
| - |
имитатор РУД.
|
Общий вид имитатора системы управления приведен на рис. 3.9.
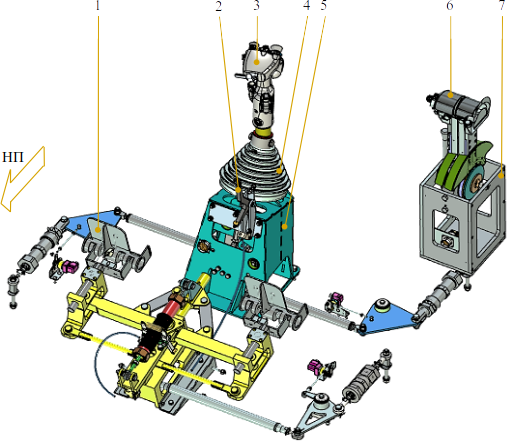
Рисунок 3.9: Общий вид имитатора системы управления
| 1. |
Имитатор педалей
|
| 2. |
Рычаг регулировки педалей по росту летчика
|
| 3. |
Имитатор РУС
|
| 4. |
Чехол поста РУС из состава имитатора РУС
|
| 5. |
Корпус поста РУС из состава имитатора РУС
|
| 6. |
Имитатор РУД
|
| 7. |
Основание имитатора РУД
|
Общий вид имитатора РУС14 приведен на рис. 3.10.
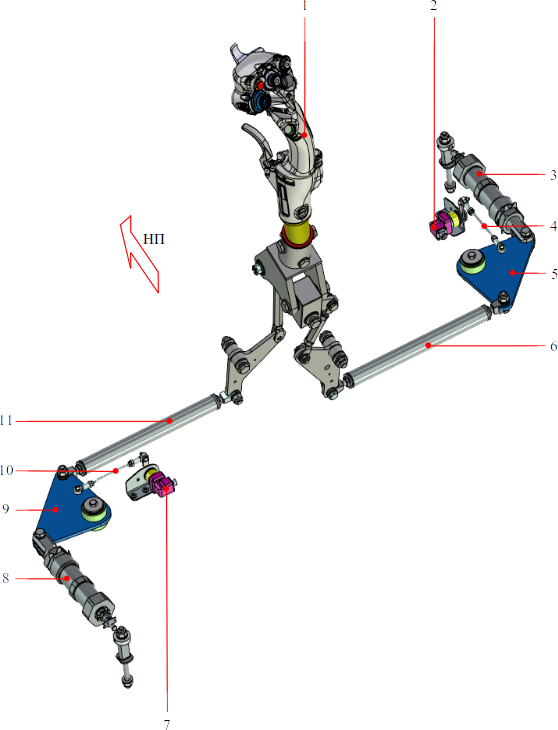
Рисунок 3.10: Общий вид имитатора РУС
| 1. |
Пост РУС (чехол и корпус не показаны)
|
| 2. |
Датчик обратной связи (ДОС) крена
|
| 3. |
Загружатель (крен)
|
| 4. |
Тяга
|
| 5. |
Кронштейн
|
| 6. |
Тяга
|
| 7. |
ДОС тангажа
|
| 8. |
Загружатель (тангаж)
|
| 9. |
Кронштейн
|
| 10. |
Тяга
|
| 11. |
Тяга
|
Общий вид поста РУС приведен на рис. 3.11.
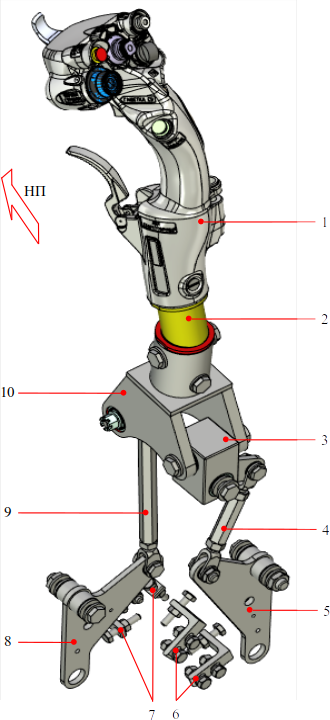
Рисунок 3.11: Общий вид поста РУС (чехол и корпус не показаны)
| 1. |
Рукоятка РУС
|
| 2. |
Труба
|
| 3. |
Крестовина
|
| 4. |
Тяга задняя
|
| 5. |
Качалка задняя
|
| 6. |
Ограничители хода РУС по крену
|
| 7. |
Ограничители хода РУС по тангажу
|
| 8. |
Качалка передняя
|
| 9. |
Тяга передняя
|
| 10. |
Качалка верхняя
|
ДОС16 предназначены для выдачи в ВК5 сигналов, пропорциональных перемещениям имитаторов органов управления самолетом.
Общий вид ДОС приведен на рис. 3.12.
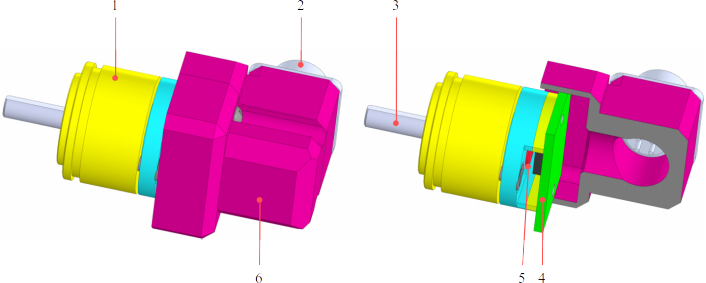
Рисунок 3.12: Общий вид ДОС (общий вид, вид в разрезе)
| 1. |
Корпус
|
| 2. |
Электрический разъем
|
| 3. |
Вал
|
| 4. |
Плата магнитного энкодера
|
| 5. |
Магнит
|
| 6. |
Крышка
|
При повороте вала (рис. 3.12, поз.3) магнит, закрепленный на нем, поворачивается относительно платы магнитного энкодера, которая формирует сигнал в виде напряжения постоянного тока, пропорционального углу поворота магнита.
При перемещениях рукоятки РУС14 в продольном (по тангажу) или поперечном (по крену) направлениях, перемещения передаются через систему тяг, качалок и кронштейнов на роторы ДОС16 крена (рис. 3.10, поз.2) и тангажа (рис. 3.10, поз.7). Сигналы с ДОС в виде напряжений постоянного тока, пропорциональных углам перемещения рукоятки РУС по крену и тангажу, поступают в БСО, преобразуются в интерфейс Ehternet и передаются в ВК.
Загрузка РУС по крену и тангажу осуществляется пружинными загружателями (рис. 3.10, поз.3 и поз.8).
Перемещения рукоятки РУС по крену и тангажу ограничиваются механическими упорами (рис. 3.11, поз.6 и поз.7).
Общий вид рукоятки РУС, с расположенными на ней органами управления, приведен на рис. 3.13.
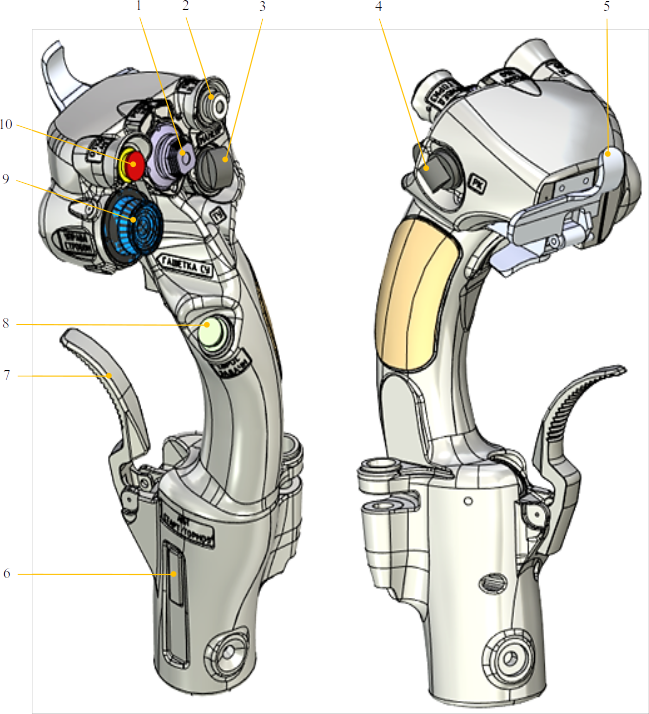
Рисунок 3.13: Общий вид рукоятки РУС
| 1. |
Переключатель РЕЖИМ КБО
|
| 2. |
Кнопка ПРИВЕД К ГОРИЗ
|
| 3. |
Переключатель МАНЕВР/ТУ
|
| 4. |
Переключатель РК
|
| 5. |
Гашетка ПОДВ
|
| 6. |
Кнопка АВТ/СТАРТ ТОРМОЗ
|
| 7. |
Рычаг тормозаКнопка СБРОС ЗАДАЧИ
|
| 8. |
Кнюппель УПРАВЛ СТРОБОМ
|
| 9. |
Кнопка ОТКЛ САУ
|
Общий вид имитатора педалей приведен на рис. 3.14.
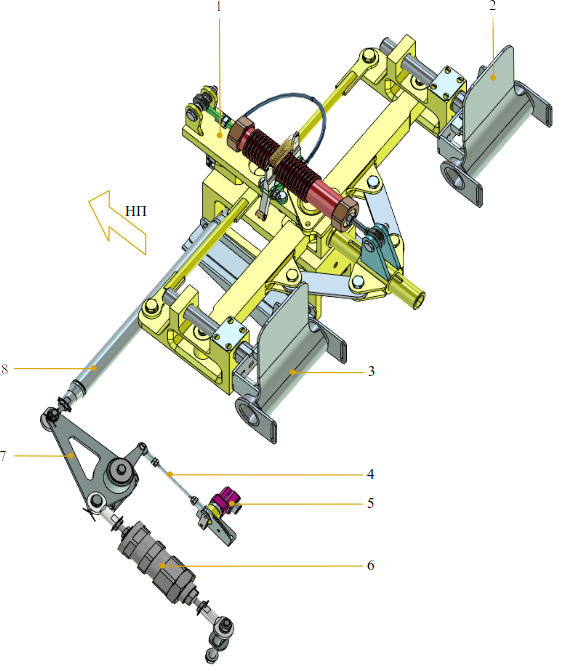
Рисунок 3.14: Общий вид имитатора педалей
| 1. |
Корпус
|
| 2. |
Педаль правая
|
| 3. |
Педаль левая
|
| 4. |
Тяга
|
| 5. |
ДОС курса
|
| 6. |
Загружатель
|
| 7. |
Качалка
|
| 8. |
Тяга
|
При перемещении левой или правой педали, перемещение через систему тяг и качалку (рис. 3.14, поз.7) передается на ДОС курса (рис. 3.14, поз.5). Сигнал с ДОС в виде напряжения постоянного тока, пропорционального перемещению левой (правой) педали, поступает в БСО, преобразовывается в интерфейс Ehternet и передается в ВК.
Загрузка педалей осуществляется пружинным загружателем (рис. 3.14, поз.6).
Регулировка положения педалей по росту летчика осуществляется при помощи механизма регулировки, включающего в себя рычаг регулировки (рис. 3.15, поз.21), загружатель (рис. 3.15, поз.3), фиксирующие рычаги (рис. 3.15, поз.9 и поз.13) с пружиной (рис. 3.15, поз.4) и тросовую проводку (рис. 3.15, поз.19).
Общий вид механизма регулировки педалей по росту летчика приведен на рис. 3.15. Перечень наименований позиций к рисунку приведен в таб. 3.4.
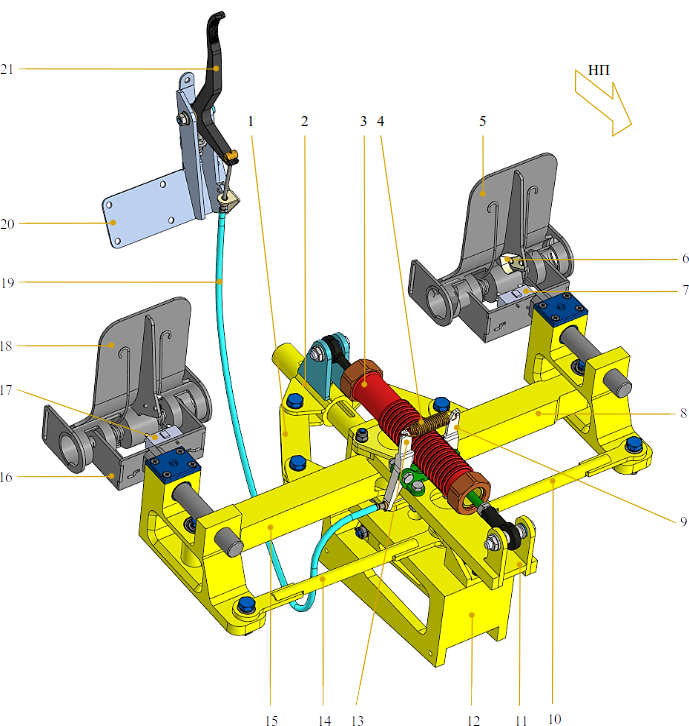
Рисунок 3.15: Общий вид механизма регулировки педалей по росту летчика
|
Позиция
|
Наименование
|
Примечание
|
|
1
|
Поводок (2 шт.)
|
–
|
|
2
|
Муфта
|
–
|
|
3
|
Загружатель
|
–
|
|
4
|
Пружина
|
–
|
|
5
|
Педаль левая
|
–
|
|
6
|
Упор (2 шт.)
|
–
|
|
7
|
Микровыключатель
|
–
|
|
8
|
Рычаг левый
|
–
|
|
9
|
Рычаг
|
–
|
|
10
|
Тяга
|
–
|
|
11
|
Корпус
|
–
|
|
12
|
Кронштейн
|
–
|
|
13
|
Рычаг
|
–
|
|
14
|
Тяга
|
–
|
|
15
|
Рычаг правый
|
–
|
|
16
|
Вилка (2 шт.)
|
–
|
|
17
|
Микровыключатель
|
–
|
|
18
|
Педаль правая
|
–
|
|
19
|
Тросовая проводка
|
–
|
|
20
|
Кронштейн
|
–
|
|
21
|
Рычаг регулировки педалей по росту летчика
|
–
|
Таблица 3.4: Перечень наименований позиций к рисунку Общий вид механизма регулировки педалей по росту летчика
Рычаг регулировки размещен на кронштейне, закрепленном на передней стороне корпуса поста РУС14. Рычаг соединен тросовой проводкой с рычагами (рис. 3.15, поз.9 и поз.13).
Загружатель представляет собой корпус с насечками для фиксации, внутри которого помещается пружина и стакан.
Общий вид загружателя (в разрезе) приведен на рис. 3.16.
Корпус загружателя (рис. 3.16, поз.3) наконечником (рис. 3.16, поз.1) жестко связан с корпусом имитатора педалей (рис. 3.15, поз.11). Стакан загружателя (рис. 3.16, поз.6) через шпильку (рис. 3.16, поз.2) и наконечник (рис. 3.16, поз.4) соединен с муфтой (рис. 3.15, поз.2), которая соединяется с педалями через поводки (рис. 3.15, поз.1) и рычаги (рис. 3.15, поз.9 и поз.13).
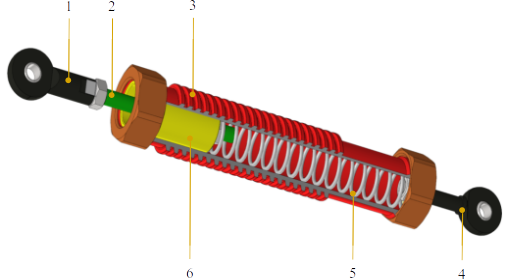
Рисунок 3.16: Общий вид загружателя (в разрезе)
| 1. |
Наконечник
|
| 2. |
Шпилька
|
| 3. |
Корпус
|
| 4. |
Наконечник
|
| 5. |
Пружина
|
| 6. |
Стакан
|
Рычаги (рис. 3.15, поз.9 и поз.13) фиксируют корпус загружателя в необходимом регулировочном положении. При повороте рычага регулировки перемещение передается через тросовую проводку на рычаги (рис. 3.15, поз.9 и поз.13). Корпус загружателя расфиксируется и при нажатии одновременно на левую и правую педали перемещается вперед (по направлению «полета»). При снятии нагрузки с педалей корпус загружателя под воздействием пружины перемещается назад (против направления полета). При достижении необходимого регулировочного положения педалей рычаг регулировки отпускается и рычаги (рис. 3.15, поз.9 и поз.13) фиксируют корпус загружателя, педали при этом также жестко фиксируются.
ВНИМАНИЕ!
ДЛЯ ИСКЛЮЧЕНИЯ ПОЛОМКИ МЕХАНИЗМА РЕГУЛИРОВКИ ПОЛОЖЕНИЯ ПЕДАЛЕЙ ПО РОСТУ ЛЕТЧИКА НАЖАТИЕ НА РЫЧАГ РЕГУЛИРОВКИ ДОПУСКАЕТСЯ ТОЛЬКО ПОСЛЕ СОЗДАНИЯ НАГРУЗКИ ОДНОВРЕМЕННО НА ЛЕВОЙ И ПРАВОЙ ПЕДАЛИ.
Для имитации управления тормозами колес основных опор шасси в имитаторе педалей установлены микровыключатели (рис. 3.15, поз.7 и поз.17). При нажатии носками ног на педали (одновременно или раздельно) они поворачиваются вокруг осей и нажимают упорами (рис. 3.15, поз.6) на микровыключатели (рис. 3.15, поз.7 и поз.17) соответственно. Сигналы с микровыключателей поступают в БСО, преобразовываются в интерфейс Еhternet и передаются в ВК.
Общий вид имитатора РУД15 приведен на рис. 3.17. Перечень наименований позиций к рисунку приведен в таб. 3.5.
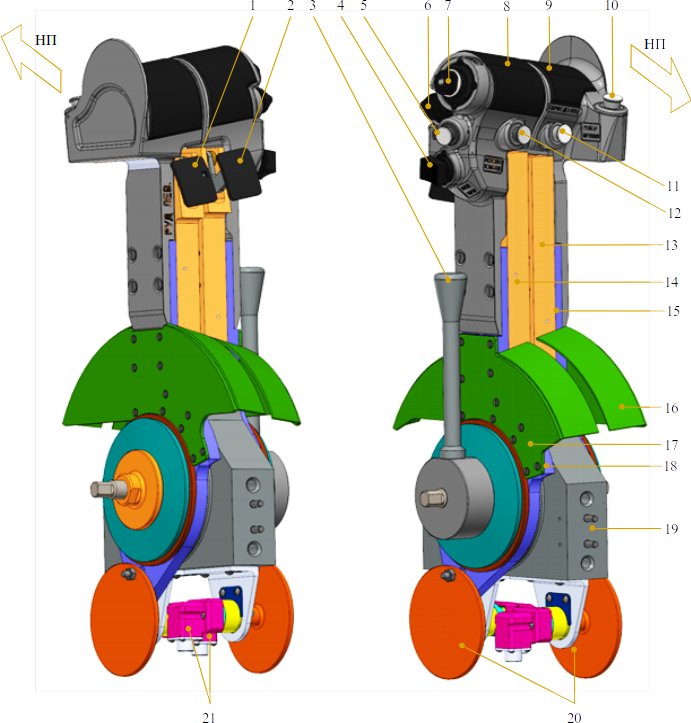
Рисунок 3.17: Общий вид имитатора РУД (основание не показано)
|
Позиция
|
Наименование
|
Примечание
|
|
1
|
Гашетка
|
–
|
|
2
|
Гашетка
|
–
|
|
3
|
Эксцентрик
|
–
|
|
4
|
Переключатель ВОЗД ТОРМ/V зад
|
–
|
|
5
|
Кнопка ВВОД
|
–
|
|
6
|
Переключатель РАДИО I-II
|
–
|
|
7
|
Переключатель УПРАВЛ ОПС
|
–
|
|
8
|
Рукоятка правого РУД15
|
–
|
|
9
|
Рукоятка левого РУД
|
–
|
|
10
|
Кнопка ВЫБОР ОРУЖИЯ
|
–
|
|
11
|
Кнопка СБРОС ДО ЛТЦ
|
–
|
|
12
|
Кнопка ИСПОЛН КОМАНД
|
–
|
|
13
|
Механизм стопорения
|
–
|
|
14
|
Механизм стопорения
|
–
|
|
15
|
Рычаг
|
–
|
|
16
|
Кожух левого РУД
|
–
|
|
17
|
Кожух правого РУД
|
–
|
|
18
|
Рычаг
|
–
|
|
19
|
Корпус
|
–
|
|
20
|
Катушка (2 шт.)
|
–
|
|
21
|
ДОС16 (2 шт.)
|
–
|
Таблица 3.5: Перечень наименований позиций к рисунку Общий вид имитатора РУД (основание не показано)
2.1.2.5 Имитатор кресла предназначен для размещения обучаемого экипажа (летчика), участвующего в тренировке. В конструкции имитатора кресла предусмотрена возможность регулировки сиденья по высоте при помощи ручки и спинки по углу наклона с фиксацией в промежуточных положениях.
Общий вид имитатора кресла приведен на рис. 3.18.
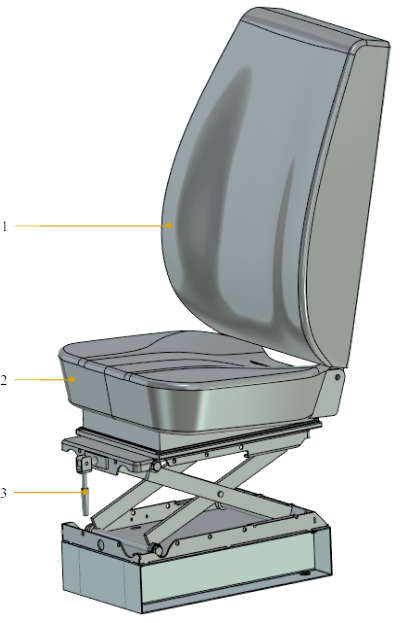
Рисунок 3.18: Общий вид имитатора кресла
| 1. |
Спинка
|
| 2. |
Сиденье
|
| 3. |
Ручка регулировки сиденья по высоте
|
2.1.2.6 Видеокамера предназначена для визуального контроля действий обучаемого экипажа (летчика).
Внешний вид видеокамеры приведен на рис. 3.19.

Рисунок 3.19: Внешний вид видеокамеры
Основные технические характеристики видеокамеры приведены в таб. 3.6.
|
Наименование характеристики
|
Значение
|
|
Напряжение питания, В
|
12
|
|
Ток потребления, мA
|
550
|
|
Форматы кодирования
|
H.264/H.265/JPEG/AVI/MJPEG
|
|
Разрешение, пиксель
|
1920×1080
|
|
Процессор
|
Hi3516D
|
|
Интерфейс
|
RG-45 10M/100M Ethernet
|
Таблица 3.6: Основные технические характеристики видеокамеры
Видеокамера смонтирована на кронштейне, размещенном на корпусе монитора М32 (рис. 3.2).
2.1.2.7 Гарнитура предназначена для индивидуального воспроизведения обучаемому экипажу (летчику) акустической информации.
Внешний вид гарнитуры приведен на рис. 3.20.

Рисунок 3.20: Внешний вид гарнитуры
Подробное описание, технические характеристики и информация по эксплуатации гарнитуры приведены в Гарнитура HyperX Cloud Core Номера деталей: KHX-HSCC-BK KHX-HSCC-BK-BR KHX-HSCC-BK-ER KHX-HSCC-BK-FR KHX-HSCC-BK-LR Документ № 480KHX-HSCC001.А01 Руководство пользователя.
2.1.2.8 Монитор М15Л, монитор М15ПП, монитор М15ПЗ, монитор М17 и монитор М32 предназначены для имитации приборного оборудования кабины самолета Су-35С. На экранах мониторов имеются зоны, при прикосновении к которым изменяются положения имитируемых тумблеров, кнопок, переключателей.
Монитор М15Л предназначен для имитации приборного оборудования левого пульта кабины самолета Су-35С.
Изображение приборного оборудования левого пульта, формируемое на экране монитора М15Л, приведено на рис. 3.21.
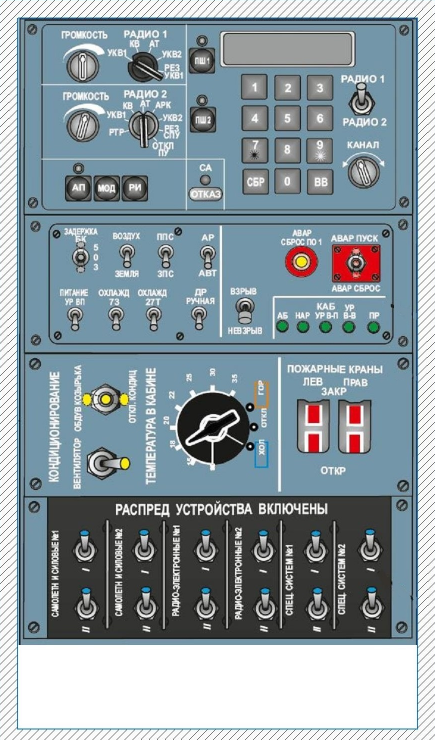
Рисунок 3.21: Изображение приборного оборудования левого пульта, формируемое на экране монитора М15Л
Монитор М17 предназначен для имитации приборного оборудования левого пульта кабины самолета Су-35С.
Изображение приборного оборудования левого пульта, формируемое на экране монитора М17, приведено на рис. 3.22.
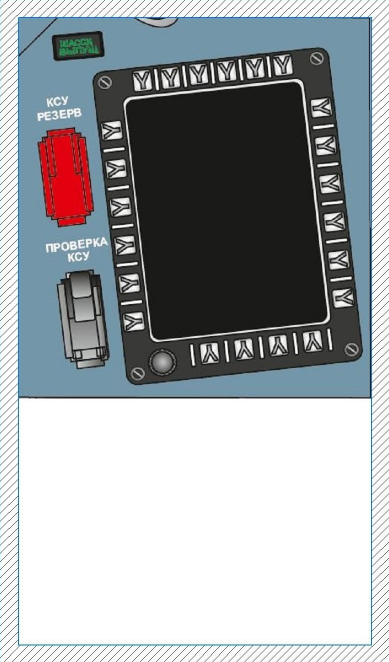
Рисунок 3.22: Изображение приборного оборудования левого пульта, формируемое на экране монитора М17
Монитор М32 предназначен для имитации приборного оборудования приборной доски кабины самолета Су-35С.
Изображение приборного оборудования приборной доски, формируемое на экране монитора М32, приведено на рис. 3.23.
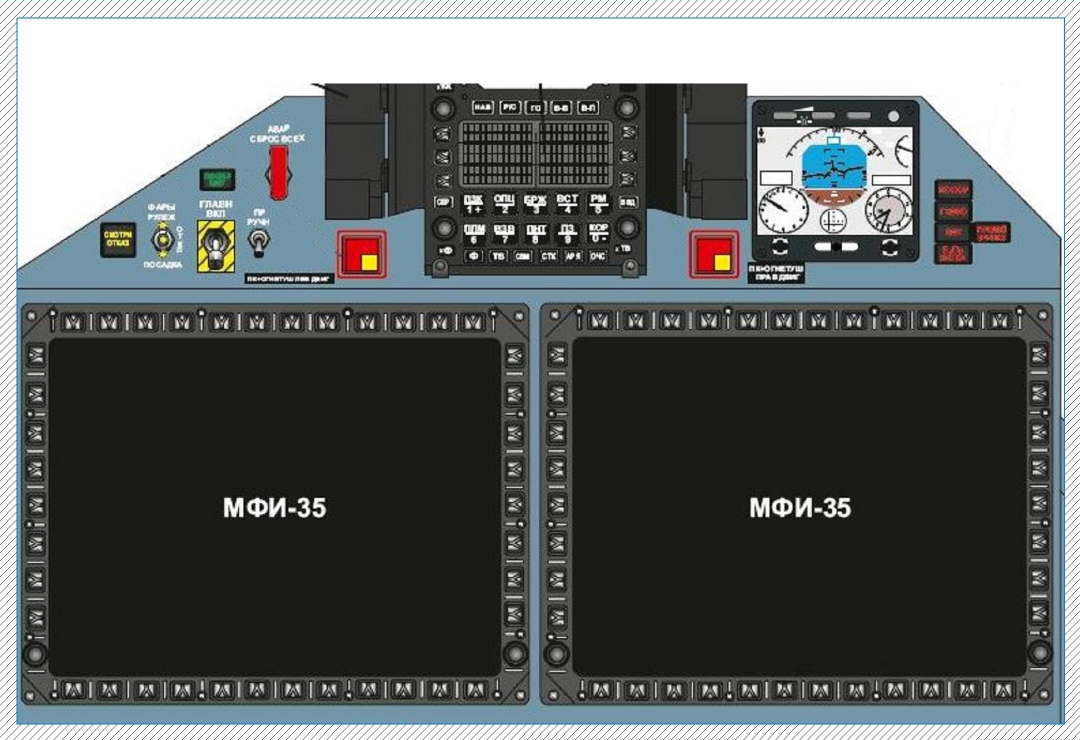
Рисунок 3.23: Изображение приборного оборудования приборной доски, формируемое на экране монитора М32
Монитор М15ПП предназначен для имитации приборного оборудования правого пульта кабины самолета Су-35С.
Изображение приборного оборудования правого пульта, формируемое на экране монитора М15ПП, приведено на рис. 3.24.

Рисунок 3.24: Изображение приборного оборудования правого пульта, формируемое на экране монитора М15ПП
Монитор М15ПЗ предназначен для имитации приборного оборудования правого пульта кабины самолета Су-35С.
Изображение приборного оборудования правого пульта, формируемое на экране монитора М15ПЗ, приведено на рис. 3.25.
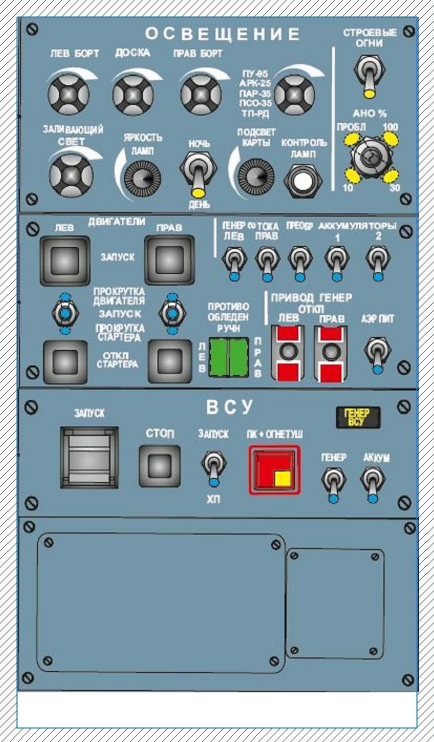
Рисунок 3.25: Изображение приборного оборудования правого пульта, формируемое на экране монитора М15ПЗ
2.1.2.9 Кабельная сеть предназначена для обеспечения подачи электропитания и передачи информации ко всем СЧ АРМ ПЛС на Су-35С.
2.1.3 Маркировка АРМЛ выполнена на маркировочной табличке в соответствии с пунктом 1.6.2 и размещена на основании.
Пломбирование АРМЛ4 изготовителем не предусмотрено.
2.1.4 Маркировка и пломбирование транспортной упаковки АРМЛ выполнены в соответствии с пунктами 1.7.12 и 1.7.13.
2.1.5 Упаковка СЧ АРМЛ в ящики ВГИП.ХХХХХХ.ХХХ, ВГИП.321231.187 и ВГИП.321231.188
Упаковку СЧ7 АРМЛ4 в ящики ВГИП.ХХХХХХ.ХХХ, ВГИП.321231.187 и ВГИП.321231.188 (7.1 Требования к транспортированию АРМ ПЛС на Су-35С и условиям, при которых оно должно осуществляться / Таблица 8.1: Перечень упаковки, ее содержимое и габаритные размеры) выполнять в следующей последовательности:
| - |
выполнить демонтаж АРМЛ в соответствии с пунктом 4.3.4;
|
||||||||||||||||||||||||
| - |
упаковать мониторы, видеокамеру и гарнитуру в упаковку производителя данных изделий;
|
||||||||||||||||||||||||
| - |
обернуть СЧ имитатора системы управления, СЧ основания АРМЛ, имитатор кресла и кабели пленкой воздушно-пузырьковой и стрейч-пленкой в три-четыре слоя;
|
||||||||||||||||||||||||
| - |
уложить все крепежные элементы в пакеты полиэтиленовые;
|
||||||||||||||||||||||||
| - |
обернуть пакеты полиэтиленовые с уложенными крепежными элементами пленкой воздушно-пузырьковой и стрейч-пленкой в три-четыре слоя;
|
||||||||||||||||||||||||
| - |
уложить в ящик ВГИП.ХХХХХХ.ХХХ мониторы, видеокамеру и гарнитуру в соответствии с надписями и указаниями, приведенными на упаковке изготовителя данных изделий в следующей последовательности:
|
||||||||||||||||||||||||
|
|||||||||||||||||||||||||
| - |
уложить в ящик ВГИП.321231.187 СЧ7 имитатора системы управления, кронштейны, имитатор кресла и крепежные элементы в следующей последовательности:
|
||||||||||||||||||||||||
|
|||||||||||||||||||||||||
| - |
уложить в ящик ВГИП.321231.188 СЧ основания АРМЛ и кабели в следующей последовательности:
|
||||||||||||||||||||||||
|
|||||||||||||||||||||||||
| - |
опломбировать ящики в соответствии с пунктом 1.7.13.
|
- Рисунок 3.1: Общий вид АРМЛ (вид спереди)
- Рисунок 3.2: Общий вид АРМЛ (вид сзади)
- Рисунок 3.3: Общий вид основания
- Рисунок 3.4: Общий вид БСО
- Рисунок 3.5: Внешний вид преобразователя
- Рисунок 3.6: Внешний вид платы TEN-60, платы TEN-60-12
- Рисунок 3.7: Внешний вид платы А13D
- Рисунок 3.8: Общий вид панели ввода-вывода
- Рисунок 3.9: Общий вид имитатора системы управления
- Рисунок 3.10: Общий вид имитатора РУС
- Рисунок 3.11: Общий вид поста РУС (чехол и корпус не показаны)
- Рисунок 3.12: Общий вид ДОС (общий вид, вид в разрезе)
- Рисунок 3.13: Общий вид рукоятки РУС
- Рисунок 3.14: Общий вид имитатора педалей
- Рисунок 3.15: Общий вид механизма регулировки педалей по росту летчика
- Рисунок 3.16: Общий вид загружателя (в разрезе)
- Рисунок 3.17: Общий вид имитатора РУД (основание не показано)
- Рисунок 3.18: Общий вид имитатора кресла
- Рисунок 3.19: Внешний вид видеокамеры
- Рисунок 3.20: Внешний вид гарнитуры
- Рисунок 3.21: Изображение приборного оборудования левого пульта, формируемое на экране монитора М15Л
- Рисунок 3.22: Изображение приборного оборудования левого пульта, формируемое на экране монитора М17
- Рисунок 3.23: Изображение приборного оборудования приборной доски, формируемое на экране монитора М32
- Рисунок 3.24: Изображение приборного оборудования правого пульта, формируемое на экране монитора М15ПП
- Рисунок 3.25: Изображение приборного оборудования правого пульта, формируемое на экране монитора М15ПЗ
- Таблица 3.1: Основные технические характеристики преобразователя
- Таблица 3.2: Основные технические характеристики платы TEN-60, платы TEN-60-12
- Таблица 3.3: Основные технические характеристики платы А13D
- Таблица 3.4: Перечень наименований позиций к рисунку Общий вид механизма регулировки педалей по росту летчика
- Таблица 3.5: Перечень наименований позиций к рисунку Общий вид имитатора РУД (основание не показано)
- Таблица 3.6: Основные технические характеристики видеокамеры